In modern automation systems, robotic interference avoidance has become a critical capability for ensuring operational efficiency and safety. As robots increasingly share workspaces with humans, machinery, and other autonomous systems, their ability to detect and evade unexpected obstacles or signal disruptions defines their reliability. This article explores emerging techniques in interference avoidance, focusing on sensor fusion, adaptive algorithms, and real-time decision-making frameworks.
Sensor Fusion: The Foundation of Perception
Robots rely on multi-sensor integration to interpret complex environments. Lidar, radar, and vision systems collectively create 3D spatial maps, while inertial measurement units (IMUs) track motion dynamics. Recent advancements in edge computing enable onboard processing of teraflop-scale data streams, reducing latency in obstacle detection. For instance, hybrid systems combining thermal imaging with millimeter-wave radar have demonstrated 92% accuracy in identifying metallic obstructions under low-visibility conditions.
Adaptive Algorithms for Dynamic Scenarios
Traditional path-planning models struggle with unpredictable interference patterns. Machine learning architectures like reinforcement learning (RL) now allow robots to "learn" evasion strategies through simulated collisions. A 2023 study by the International Robotics Consortium revealed that RL-trained robots reduced collision rates by 41% compared to rule-based systems. Moreover, swarm robotics leverages distributed intelligence, where units share environmental data to collectively reroute around electromagnetic interference zones in industrial settings.

Real-Time Decision Architectures
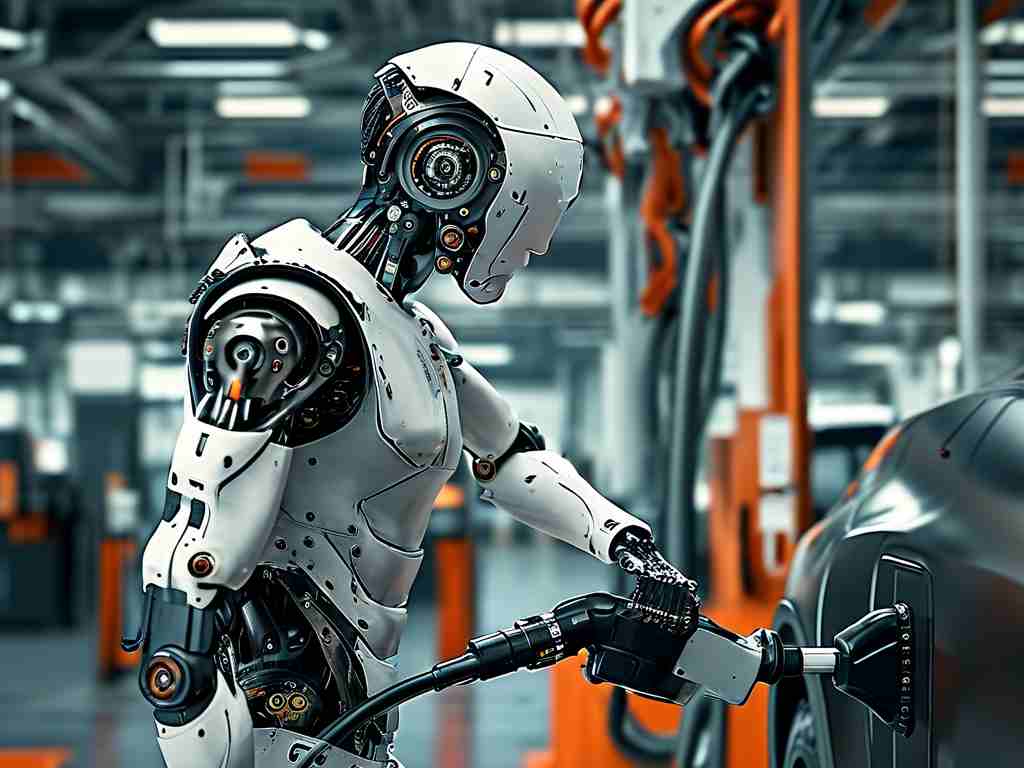
Microsecond-level responsiveness separates functional robots from exceptional ones. Field-programmable gate array (FPGA) chips process collision-avoidance logic in parallel with primary operations, enabling split-second course corrections. In automotive manufacturing lines, this technology helped reduce robotic arm downtime by 17% by minimizing false triggers from welding sparks. Code snippet below illustrates a simplified prioritization logic:
def hazard_response(sensor_input):
threat_level = analyze_threat(sensor_input)
if threat_level > THRESHOLD_CRITICAL:
execute_emergency_stop()
elif threat_level > THRESHOLD_HIGH:
activate_secondary_path()
else:
adjust_velocity(sensor_input)
Challenges in Signal Integrity Maintenance
Wireless communication vulnerabilities remain a persistent hurdle. Researchers at MIT recently developed quantum-resistant encryption protocols for robot-to-control-center data links, mitigating risks from malicious signal jamming. Simultaneously, hardware innovations like directional antennas minimize cross-talk in multi-robot environments.
Industry Applications and Future Outlook
From warehouse logistics drones avoiding falling debris to surgical robots compensating for physiological tremors, interference avoidance technologies span diverse sectors. The global market for such systems is projected to reach $8.3 billion by 2028, driven by demand in aerospace and precision agriculture. Emerging trends include bio-inspired designs mimicking insect swarm behavior and self-healing circuits that reroute power during electromagnetic pulses.

As artificial intelligence continues evolving, the next frontier lies in predictive interference modeling. By analyzing historical operational data, robots may soon anticipate and neutralize disruptions before they materialize, achieving near-flawless autonomy. However, ethical considerations around decision prioritization—such as choosing between protecting equipment or human safety—require ongoing interdisciplinary dialogue.