The ability to stand upright is a fundamental yet extraordinarily complex challenge for humanoid robots. Unlike wheeled or quadrupedal robots, bipedal systems must continuously adapt to gravity, uneven terrain, and external disturbances while maintaining equilibrium. This article explores the multidisciplinary advancements in humanoid robot standing technology, focusing on mechanical design, sensor integration, control algorithms, and the role of artificial intelligence (AI) in achieving stable bipedal posture.
1. The Physics of Bipedal Stability
Humanoid robots mimic human anatomy, but replicating human balance requires overcoming significant engineering hurdles. The center of mass (CoM) in bipedal systems is inherently high relative to the support base (the feet), making them prone to tipping. To counteract this, robots rely on precise joint actuation and real-time adjustments. Mechanical components such as servo motors, hydraulic actuators, and lightweight yet durable materials (e.g., carbon fiber) enable rapid limb movements. For example, Boston Dynamics' Atlas robot uses series elastic actuators to absorb impacts and maintain flexibility, akin to human muscles and tendons.
2. Sensor Fusion: Eyes and Ears of Balance
Stable standing depends on a robot's ability to perceive its environment and internal state. Inertial measurement units (IMUs) track orientation and acceleration, while force-sensitive resistors (FSRs) in the feet measure ground contact pressure. Cameras and LiDAR provide spatial awareness, helping robots detect slopes or obstacles. Advanced systems, like those in Honda's ASIMO, integrate these sensors into a centralized feedback loop, allowing milliseconds-level adjustments. Sensor fusion algorithms, often based on Kalman filters, merge data streams to create a coherent model of the robot's posture and surroundings.
3. Control Algorithms: The Brain Behind the Motion
Balance control algorithms translate sensor data into actionable movements. Proportional-Integral-Derivative (PID) controllers are widely used for joint positioning, but bipedal stability demands more sophisticated approaches. Model Predictive Control (MPC) anticipates future states and optimizes movements accordingly. For instance, researchers at MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) developed an MPC framework that enables robots to recover from pushes or slips by predicting CoM trajectories. Additionally, Zero Moment Point (ZMP) theory-a cornerstone of bipedal robotics-ensures dynamic stability by keeping the robot's CoM within its support polygon.

4. AI and Machine Learning: Adaptive Balance
Traditional control systems struggle with unpredictable environments, such as icy surfaces or moving platforms. Here, AI-driven methods shine. Reinforcement learning (RL) allows robots to "practice" balance through simulated trials, optimizing policies for stability. OpenAI's work on robotic dexterity demonstrates how RL can teach robots to adapt to destabilizing forces. Deep neural networks also enable real-time anomaly detection, such as identifying a sudden weight shift caused by carrying objects. Hybrid approaches, combining model-based control and AI, are increasingly popular; Toyota's T-HR3 humanoid, for example, uses AI to refine predefined motion patterns based on sensory feedback.
5. Challenges and Future Directions
Despite progress, humanoid robots still lag behind humans in energy efficiency and adaptability. Power-hungry actuators limit operational time, while handling soft or unstable surfaces (e.g., sand) remains problematic. Future advancements may involve bio-inspired designs, such as passive dynamic walkers that minimize energy use, or neuromorphic computing to mimic the human nervous system's efficiency. Collaborative research between biomechanics and AI could yield breakthroughs, such as robots that "learn" to balance instinctively, much like a toddler.
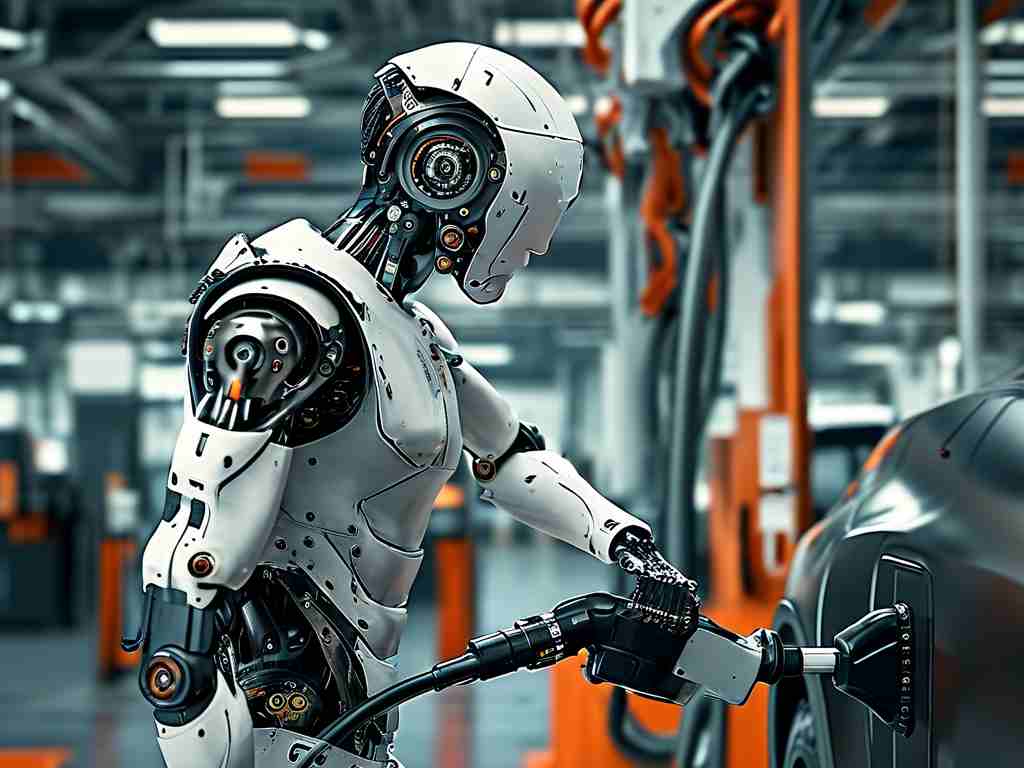
6. Applications Beyond the Lab
Stable bipedal robots have transformative potential. In disaster response, they could navigate rubble where wheeled vehicles fail. In healthcare, assistive humanoids could help patients stand or walk. Industrial settings might deploy them for tasks requiring human-like dexterity, such as assembly line work. As the technology matures, ethical considerations-from job displacement to safety protocols-will demand equal attention.
Humanoid robot standing technology sits at the intersection of mechanics, control theory, and AI. While challenges persist, each breakthrough brings us closer to robots that move and interact as seamlessly as humans. As algorithms grow smarter and hardware more resilient, bipedal robots may soon step out of controlled labs and into our daily lives, redefining industries and expanding the boundaries of automation.