The rapid evolution of humanoid robotics has captivated engineers, researchers, and enthusiasts alike. At the heart of this fascination lies the intricate interplay of mechanical, electrical, and software systems that mimic human capabilities. This article dissects the technological framework of humanoid robots through detailed visual analysis, revealing how cutting-edge innovations converge to create machines that walk, talk, and interact like humans.
1. Structural Skeleton: The Mechanical Backbone
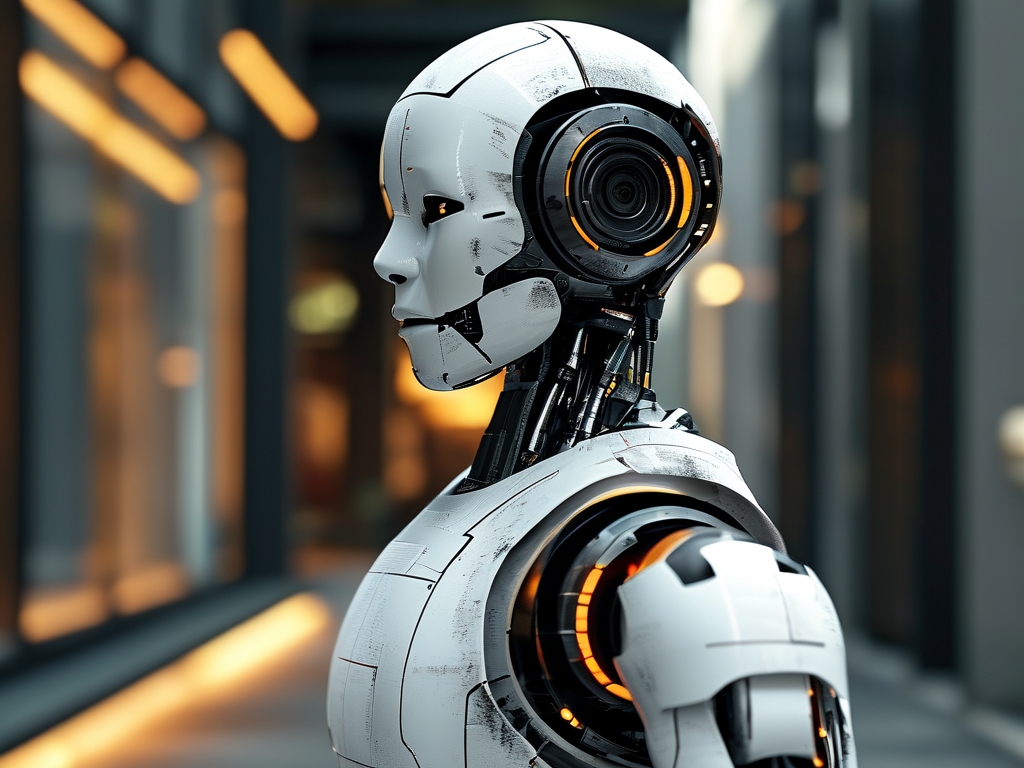
Humanoid robots begin with a biomechanically inspired skeleton. Modern designs often use lightweight alloys like aerospace-grade aluminum or carbon fiber composites to balance strength and mobility. Joints replicate human articulation-rotary actuators at the hips, knees, and shoulders enable multi-axis movement, while elastic tendons mimic muscle flexibility. A key innovation lies in passive compliance mechanisms, which allow joints to absorb impacts, preventing damage during falls.
In dissected diagrams, the spinal column reveals a modular design: stacked servo motors and sensors enable torso rotation while maintaining balance. The ribcage-like structure houses critical components like power supplies and cooling systems, protected by impact-resistant polymer casings.
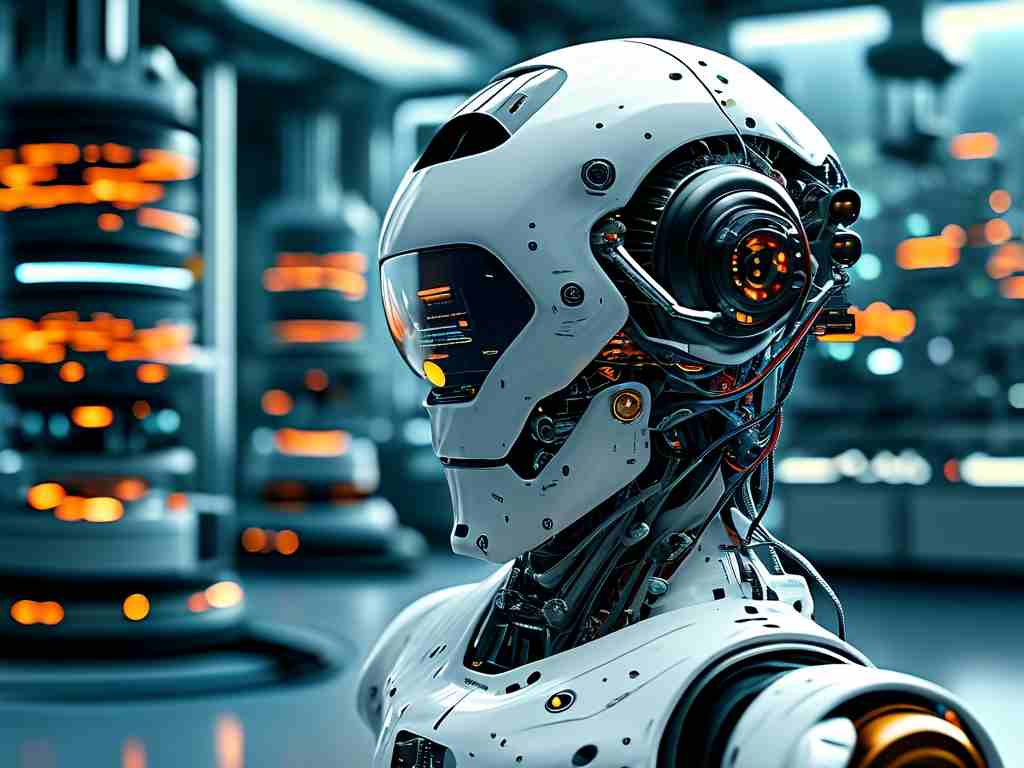
2. Sensory Nervous System: Vision, Touch, and Beyond
Humanoid robots rely on sensor arrays that surpass human senses in some domains. High-resolution stereo cameras with LiDAR integration provide 3D spatial mapping, while thermal sensors detect ambient temperature shifts. Tactile feedback systems, such as piezoelectric pressure sensors embedded in synthetic skin, allow robots to "feel" textures and adjust grip strength.
Notably, auditory systems combine microphone arrays with AI-driven noise cancellation, enabling voice recognition even in chaotic environments. Proprioceptive sensors-gyroscopes, accelerometers, and torque sensors-work in tandem to maintain equilibrium, akin to the human inner ear.
3. Artificial Intelligence: The Cognitive Core
The "brain" of a humanoid robot is a distributed computing architecture. Central processing units (CPUs) handle task coordination, while graphics processing units (GPUs) accelerate machine vision and deep learning algorithms. Neuromorphic chips, designed to emulate neural networks, enable real-time decision-making.
In visual breakdowns, layered software stacks become apparent:
- Perception Layer: Processes raw sensor data into actionable insights.
- Decision Layer: Utilizes reinforcement learning to adapt to dynamic scenarios.
- Control Layer: Converts decisions into actuator commands with millisecond precision.
4. Power and Mobility: Energy Management Challenges
Humanoid robots face a critical trade-off: energy density vs. mobility. Lithium-sulfur batteries offer higher energy density than traditional Li-ion cells but require sophisticated thermal management systems, visible as copper cooling channels in cross-sectional views. Hybrid power systems, combining batteries with supercapacitors, provide bursts of energy for sudden movements like jumping.
Legged locomotion remains a pinnacle challenge. Hydraulic actuators deliver immense force for running but consume substantial power, whereas electric motors prioritize efficiency over strength. Recent prototypes use variable stiffness actuators (VSAs) to dynamically adjust joint rigidity, optimizing energy use across tasks.
5. Human-Robot Interaction: The Interface Frontier
Facial expression modules combine micro-servos with flexible OLED displays to simulate emotions. Vocal synthesis engines employ waveform concatenation and emotion modulation algorithms, enabling tone-adaptive speech. Haptic feedback gloves, when paired with robot hands, allow bidirectional touch communication.
Ethical safeguards are embedded in interaction protocols. For instance, force-limiting algorithms prevent robots from exerting unsafe pressure during handshakes, while privacy-focused vision systems blur faces unless consent is given.
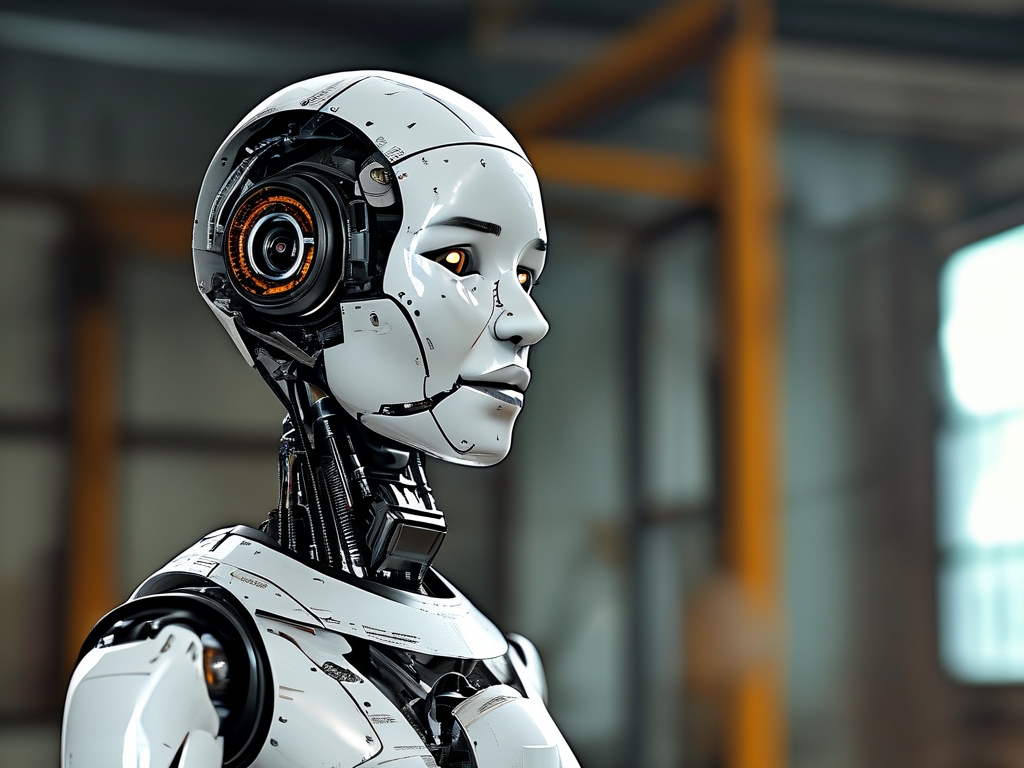
6. Case Study: Dissecting a Next-Gen Humanoid
A labeled teardown of the Atlas-X robot (hypothetical model) illustrates these principles:
- Head Unit: Contains 4K cameras, a 360° microphone array, and a graphene-based thermal sensor.
- Torso: Modular battery packs surrounded by phase-change materials for heat absorption.
- Limbs: Carbon-fiber bones with VSA joints and self-healing polymer sheathing.
- Back Panel: Wireless charging coils and a fail-safe emergency power cutoff.
7. Future Directions: From Lab to Society
Emerging trends include biohybrid systems (e.g., muscle tissue integrated with actuators) and quantum computing-enhanced AI. However, challenges persist: improving energy autonomy, reducing production costs, and addressing ethical concerns about human-robot coexistence.
Deconstructing humanoid robots through technical imagery unveils a symphony of interdisciplinary engineering. As these machines evolve from industrial tools to companions and caregivers, understanding their anatomy becomes crucial for shaping a future where humans and robots collaborate seamlessly.