Humanoid robots, designed to mimic human appearance and behavior, represent one of the most advanced frontiers in robotics. Their development integrates multidisciplinary principles from mechanical engineering, artificial intelligence, biomechanics, and cognitive science. This article explores the core technological principles behind humanoid robots, focusing on their structural design, motion control, sensory systems, and cognitive capabilities.
1. Structural Design and Biomechanical Mimicry
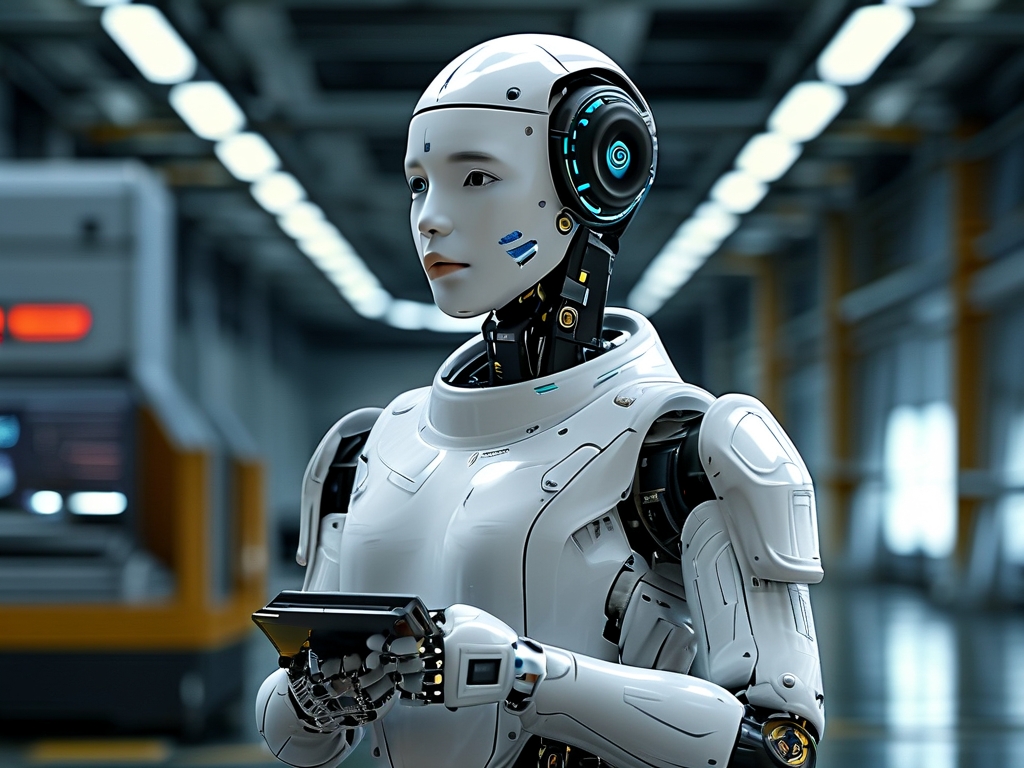
The foundation of humanoid robotics lies in replicating the human body’s biomechanical structure. Engineers use lightweight materials like carbon fiber and aluminum alloys to construct skeletal frameworks that mirror human joints and limbs. For instance, the humanoid shoulder joint often employs a spherical mechanism to replicate the wide range of motion of a human shoulder. Similarly, robotic hands incorporate tendon-driven systems or pneumatic actuators to achieve delicate grasping tasks.
A key challenge is balancing strength and flexibility. Modern humanoids, such as Boston Dynamics’ Atlas, utilize hydraulic actuators for high-power movements, while softer robots like Honda’s ASIMO rely on electric motors for smoother, quieter motion. The integration of artificial muscles—such as shape-memory alloys or electroactive polymers—is also emerging as a breakthrough for lifelike movements.
2. Motion Control and Balance
Humanoid locomotion requires sophisticated control algorithms to maintain balance and adapt to uneven terrain. Central to this is the zero-moment point (ZMP) theory, which ensures stability by keeping the robot’s center of pressure within its support polygon. Sensors like inertial measurement units (IMUs) and force-torque sensors feed real-time data to control systems, enabling dynamic adjustments during walking or running.
Advanced models now leverage model predictive control (MPC) and reinforcement learning to optimize gait patterns. For example, OpenAI’s robotics team has demonstrated humanoids that learn to walk via simulation-trained neural networks, transferring skills to physical robots.
3. Sensory Systems and Environmental Interaction
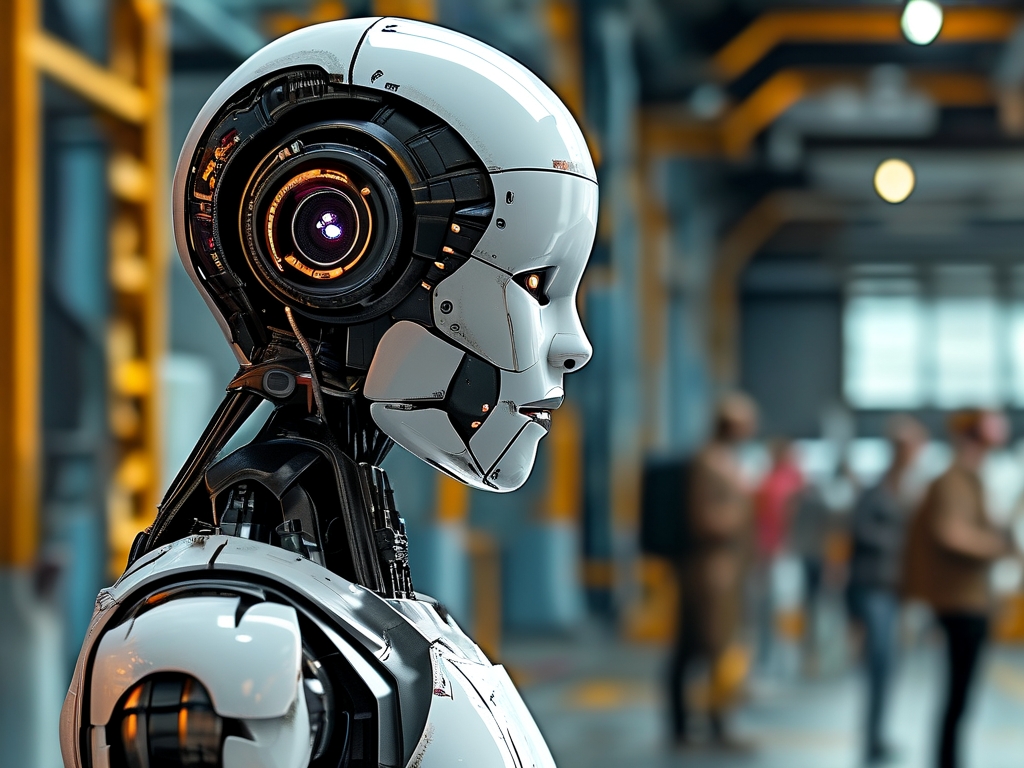
Humanoids rely on multimodal sensors to perceive their surroundings. Vision systems, often combining RGB cameras, LiDAR, and depth sensors, enable object recognition and spatial mapping. Tactile sensors embedded in robotic skin—using piezoelectric or capacitive technologies—allow for gentle interactions, such as shaking hands or handling fragile objects.

Auditory processing is another critical area. Microphone arrays paired with natural language processing (NLP) algorithms let robots understand and respond to voice commands. Toyota’s T-HR3, for instance, uses binaural audio systems to locate sound sources accurately.
4. Cognitive Architecture and AI Integration
The “brain” of a humanoid robot is its AI-driven cognitive system. This includes:
- Perception modules for processing sensory data.
- Decision-making engines that use symbolic reasoning or deep learning.
- Memory networks to store and retrieve task-related information.
Cognitive architectures like SOAR or ACT-R enable robots to simulate human-like thought processes, such as planning a path or solving puzzles. Meanwhile, large language models (LLMs) like GPT-4 enhance conversational abilities, allowing robots to engage in context-aware dialogues.
5. Energy Efficiency and Power Management
Humanoids face significant energy challenges due to their complex actuators and computing systems. Innovations include hybrid power systems combining batteries with supercapacitors for peak-load demands. Researchers are also exploring biomimetic energy harvesting, such as piezoelectric shoe inserts that generate electricity from walking.
6. Applications and Ethical Considerations
Humanoid robots are revolutionizing industries:
- Healthcare: Assisting in surgeries or elderly care.
- Disaster Response: Navigating hazardous environments.
- Education: Serving as interactive tutors.
However, ethical concerns persist, particularly regarding job displacement and privacy. Ensuring transparent AI decision-making and establishing regulatory frameworks are critical for societal acceptance.
7. Future Directions
Future advancements may include neuromorphic computing to emulate brain-like processing and self-healing materials for durable robotic skin. Collaborative humanoids working alongside humans in factories or homes will likely become mainstream, driven by 5G connectivity and edge computing.
Humanoid robot technology is a symphony of engineering and AI, pushing the boundaries of what machines can achieve. While challenges remain in energy, cost, and ethics, ongoing research promises robots that not only mimic humans but also augment human capabilities in unprecedented ways. As this field evolves, it will redefine industries, lifestyles, and our understanding of human-machine collaboration.